Describe the simple problem-solving agent providing both the pseudocode and an informal description.
Is a Particular type of goal-based agent, that means it act to achieve itsgoals.
Representation: atomic (the states have no internal structure visible to the problem-solving algorithm)
Environment:
- observable
- known
- deterministic
Solution: fixed sequence of actions
Search: process of looking for such a sequence
Search algorithm:
- input: problem
- output: an action sequence
The sequence in output can then be executed without worrying about the environment.
The agent execute repeatedly:
- Formulates a goal and a problem.
- Searches for a sequence of actions that would solve the problem.
- Executes the actions one at a time.
PSEUDOCODE image

Provide the formal definition of search problem (describe its components and transition model), solutions, and optimal solution in a search problem.
A problem can be defined formally by:
- Initial state: of the agent
- Actions available to the agent
- Given a state s, ACTIONS(s) returns the set of actions that can be executed in
- We say that each of these actions is applicable in s
- Transition model: description of what each action does.
- RESULT(s,a) returns the state obtained from doing action a in state s
- Successor: any state reachable from a given state by a single action
- Goal test: allows to check if a state is a goal.
- Path cost: numeric value associated to each path reflecting the desired performance measure. We assume path costs to be additive: sum of step costs.
Step cost c(x,a,y) :for going from state x to state y by performing action a. Assumed to be ≥ 0.
Solution: a sequence of actions (path) leading from the initial state to a goal state.
Optimal solution: a solution with minimal path-cost.
Describe Breadth-first search and Depth-first search. What are the main differences between them?
Breadth-first search
Expand shallowest unexpanded node.
Implementation: frontier is a FIFO queue, i.e., new successors go at end
Goal test is applied to each node when it is generated rather than when it is selected for expansion.
Properties:
- Completeness: only if b is finite
- Optimality: only if cost = 1 per step
- Time: O(b^(d+1))
- Space: O(b^(d+1)) keeps every generated node in memory
Depth-first search
Expand deepest unexpanded node.
Implementation: frontier = LIFO queue, i.e., put successors at front
Properties:
- Completeness: only in finite state spaces
- Optimality: No
- Time: O(b^m), terrible if m is much larger than d
- Space: O(bm)
Describe greedy best-First search.
Informed search strategies use problem-specific knowledge to speed up the search process.
Best-first search: Node is chosen for expansion based on an evaluation function f(n) that is a cost estimate, so is expanded the node with lowest f(n) first.
A component of f is Heuristic function h(n) = estimate of cost of the cheapest path from the state of the node n to a goal state.
- depends only on the state associated with n
- h(n) is non negative
- h(n)=0 at every goal state
Special cases of Best first search: greedy, A*
Greedy best first search
Expands the node that appears to be closest to goal. f(n)=g(n)
Properties:
- Completeness: No, can be trapped in dead ends.
- Optimality: No
- Time: O(b^m), but a good heuristic can give dramatic improvement
- Space: O(b^m), keeps all nodes in memory
Describe algorithm A*.
15/06/2021
Informed search strategies use problem-specific knowledge to speed up the search process.
Best-first search: Node is chosen for expansion based on an evaluation function f(n) that is a cost estimate, so is expanded the node with lowest f(n) first.
A component of f is Heuristic function h(n) = estimate of cost of the cheapest path from the state of the node n to a goal state.
- depends only on the state associated with n
- h(n) is non negative
- h(n)=0 at every goal state
Special cases of Best first search: greedy, A*
A* star search
Avoid expanding paths that are already expensive.
f(n) = g(n) + h(n)
- g(n) = path cost from the start node to node n
- h(n) = estimated cost of the cheapest path from n to goal
- f(n) = estimated cost of the cheapest solution through n
We expand the node with lowest f(n)
Properties:
- Completeness: yes, unless there are infinitely many nodes with f<=f(G)
- Optimality: Yes
- Time: O(b^m)
- Space: O(b^m), keeps all nodes in memory
Dare la definizione di euristica consistente e di euristica ammissibile.
15/06/2021
Admissible Heuristics: h is admissible if for every node n: h(n)<=h*(n)
where h*(n) is the true cost form n to goal.
It never overestimates the cost to reach the goal.
Consistent heuristics: h is consistent if for every node n, for every successor n’ of n generated by an action a, h(n)<=c(n,a,n’) + h(n’)
Describe hill climbing search providing both the pseudocode and an informal description.
Spiegare per quali ragioni spesso l’hill climbing rimane bloccato.
Local Search algorithms
In many optimization problems the path from the start node to the goal is irrelevant we care just about the goal state.
They keep a single node and move to adjacent nodes.
Useful for solving optimization problems, where the goal is to find the best state according to an objective function.
State space = set of “complete” configurations
Find configuration satisfying constraints.
Local search algorithms explore the state-space landscape.
State-space landscape: it has a location (defined by the state) and an elevation (defined by the value of heuristic cost function or objective function)
The aim is to find: a global minimum (lowest valley) if elevation corresponds to cost or a global maximum (highest peak ) if elevation corresponds to objective function.
Hill-climbing search
Assume the elevation corresponds to the objective function.
Modifies the current state to try to improve it.
At each steps: Picks a neighbor with the highest value. (Usually chooses at random among neighbors with maximum value)
Terminates when it reaches a “peak” where no neighbor has a higher value.
Pseudocode: image
Problem: often gets stuck in
- Local maxima: a peak that is higher than each of its neighboring states but lower than the global maximum.
- Plateau: a flat area of the state-space landscape. Flat local maximum, from which no progress is possible or a shoulder, from which progress is possible.

Describe the local beam search algorithm.
15/06/2021
Keep track of k states rather than just one.
- Start with k randomly generated states.
- At each iteration all the successors of all k states are generated
- If any one is a goal state the algorithm stops, Else select the k best successors from the complete list and repeat (they could be all successors of the same node).
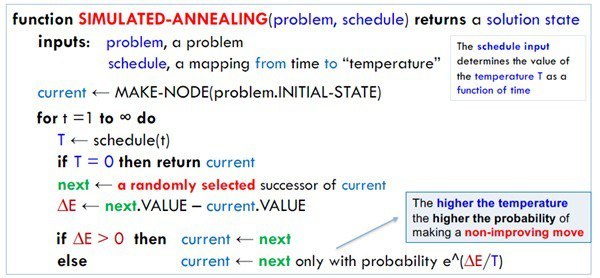
Describe simulated anealing algorithm and pseudocode.
(Invented question, not in past exams)
Version of stochastic hill climbing where some downhill moves are allowed.
If the move improves the situation is always accepted, otherwise is accepted with some probability less than 1 that decrease exponentially over time.
Idea: escape local maxima by allowing some “bad” moves but gradually decrease their frequency.
One can prove: If T decreases slowly enough, then simulated annealing search will find a global optimum with probability approaching 1.
Pseudocode: IMAGE